Adaptation of Scenario-based Model Predictive Control for Inland Waterways
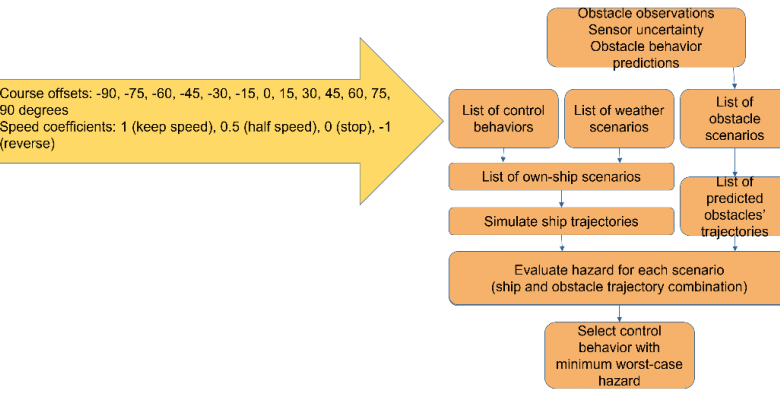
Over the years, numerous algorithms have been proposed for achieving collision avoidance in autonomous vessels. One of such algorithms is the Scenario-based Model Predictive Control (SB-MPC) [1], primarily designed for the open sea. It is a reactive collision avoidance method based on forward simulation and receding horizon optimization. In SB-MPC, the input to the autopilot of the vessel is parameterized as a course command (χd) and a speed command (Ud). The main objective of the algorithm is to find the optimum course and speed modifications i.e., course offset (Um) and speed coefficient (χm), that would aid the vessel to avoid hazardous situations. Figure 1 shows an overview of the functionality of this algorithm.
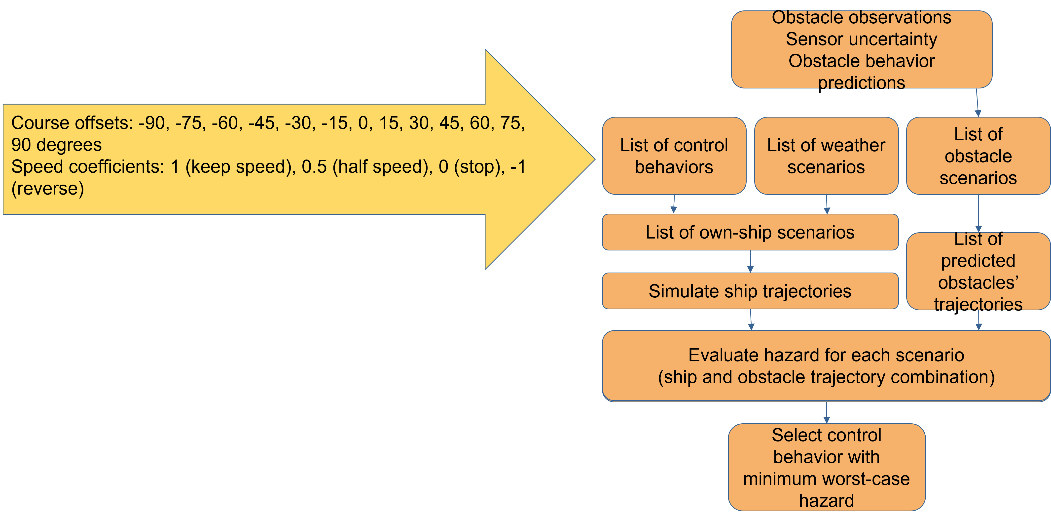
Figure 1: Summary of SB-MPC. The illustration is based on a figure from [1].
Due to an increased interest in using inland waterways such as navigable rivers and canals for cargo transportation, autonomy in inland waterway transportation has become a separate research area of interest over recent years. Inland waterway navigation comes with its own set of unique challenges that hinders the ability for direct adaptation of algorithms designed for open waters.
The following aspects are identified as required to be addressed by an algorithm designed for autonomous ship navigation in inland waterways.
- Static obstacle avoidance capability: It is more than likely for inland waterways to encounter static obstacles such as reeks, wrecks, navigational aids, fishing zones, small islands and other static obstacles found in harbor environments e.g., moored vessels, that are unmapped.
- Dynamic obstacles: Inland waterways are often congested and densely trafficked compared to open waters.
- Riparian land aware navigation capability: The term riparian land is used to refer to the grounding hazard on either side of the waterbody e.g., riverbank. Unlike open waters, inland waterways are narrow waterbodies which force the vessel to frequently encounter land when de-routing from the pre-planned path to avoid dynamic obstacles. Therefore, if possible, it is better to handle riparian land as a separate entity from the other static obstacles mentioned above and implement a collision-avoidance strategy specifically catered for it to improve the overall performance of the algorithm.
- Traffic rule compliance: It is necessary for the algorithm to adhere to applicable local traffic rules when navigating and performing collision-avoidance maneuvers.
- Adaptability of the algorithm for secondary objectives: Such as use of minimum time and/or the least amount of energy.
On this basis, several issues can be recognized when utilizing SB-MPC for collision avoidance in inland waterways such as:
- Resolution insufficiency of the solutions due to being derived from a discretized finite solution pool.
- Erratic solutions due to abrupt changes in the state of the hazardous environment because of congestion in inland waterways.
Through my work in the AUTOBarge project I intend to address such issues and improve the general performance of the SB-MPC algorithm.
An article by Dhanika Mahipala
Reference
[1] T.A. Johansen, T. Perez, and A. Cristofaro, “Ship Collision Avoidance and COLREGS Compliance Using Simulation-Based Control Behavior Selection With Predictive Hazard Assessment,” IEEE Trans. Intell. Transp. Syst., vol. 17, no. 12, pp. 3407–3422, Dec. 2016, doi: 10.1109/TITS.2016.2551780.




