If we lived in a cartoon world, what would AUTOBarge ESRs look like?
If we lived in a cartoon world, what would our ESRs (Early Stage Researchers) in autobarge look like? Here, we generate cartoon images that combine their research fields with playful, animated elements.
All pictures in this blog are generated by OpenAI’s DALL·E.
More details about all ESRs and their research topics can be found on our website: https://etn-autobarge.eu/team/
WORK PACKAGE 1: Sense and Understand – Situation Awareness in the Inland Waterway Ecosystem
ESR 1: Yanyun Zhang, “Online identification of vessel dynamics in confined inland waterways”
Opinion: This research is crucial as mastering the dynamics of vessels in confined waterways is fundamental to the success of autonomous navigation. The ability to adapt to environmental changes in real-time could significantly enhance safety and efficiency.

ESR2: Martin Baerveldt, “Unifying Simultaneous Localization and Mapping (SLAM) and Extended Object Tracking (EOT) for autonomous vessels in confined waterways”
Opinion: The integration of SLAM and EOT is innovative and could provide a groundbreaking approach to autonomous navigation. This could greatly improve the autonomy and accuracy of vessel positioning and obstacle detection.

ESR 3: Zhongbi Luo, “From static to dynamic Inland Electronics Charts (IENC)”
Opinion: Transitioning to dynamic navigation charts is an essential step forward. It’s a transformative approach that can greatly improve the adaptability and responsiveness of navigation systems to real-world changes.

ESR 4: Hoang Anh Tran, “Protocols for communication between autonomous vessels themselves and autonomous vessels and traffic control”
Opinion: The development of robust communication protocols is key to the interoperability of autonomous systems. Effective communication standards could revolutionize traffic management and enhance cooperative navigation.
 WORK PACKAGE 2: Decide and Act-Effective Path Planning and Motion Control
WORK PACKAGE 2: Decide and Act-Effective Path Planning and Motion Control
ESR 5: AmirReza Haqshenas Mojaveri, “Enhanced Track Keeping Pilots based on model predictive control of autonomous inland vessels”
Opinion: Precision in track-keeping using predictive controls can drastically reduce the risk of accidents. This research is vital for the implementation of autonomous technologies in environments with high traffic and narrow passages

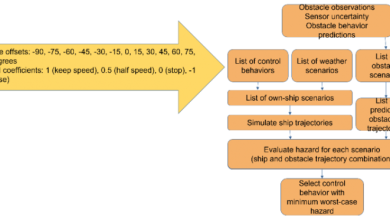
ESR6: Dhanika Mahipala, “Scenario-based Model Predictive Control for collision avoidance and traffic control of autonomous ships in inland waterways”
Opinion: Addressing collision avoidance through predictive control is highly impactful. It not only enhances safety but also serves as a foundation for more complex navigation strategies in crowded waterways.

ESR 7: Yuhan Chen, “Real-time multi-objective voyage optimization algorithms based on on-line machine learning for efficient autonomous navigation”
Opinion: Optimizing voyages in real-time using machine learning is an ambitious yet crucial endeavor. The potential to optimize for multiple objectives simultaneously could redefine operational efficiency in maritime transport.

ESR 8: Chengqian Zhang, “Sailing energy optimization”
Opinion: Energy optimization is not only technically challenging but also environmentally significant. This work could lead to more sustainable maritime operations, which is increasingly important in our climate-conscious world.

ESR 9: Abhishek Dhyani, “Fault diagnosis for safe control and coordination of inland waterway interconnected systems”
Opinion: Developing fault diagnosis systems is fundamental for ensuring the reliability and safety of autonomous systems. This research is critical for building trust in autonomous maritime operations.
WORK PACKAGE 3: Socio-Technical, Economic and Legal Aspects – making Autonomous Shipping Successful
ESR 10: Yunjia Wang, “Safety assurance of remotely operated and fully autonomous inland vessels”
Opinion: Safety assurance is paramount, and this research could set new industry standards. Establishing robust safety protocols for remote and autonomous operations is essential for public acceptance and regulatory approval.

ESR 11: Rana Saha, “Data content, sharing and exploitation: defining common ground and actor network for collaborative decision making in autonomous inland waterways”
Opinion: Facilitating effective data sharing and exploitation is central to collaborative autonomous operations. This research could pave the way for smarter, more connected waterway systems.
ESR 12: Lingyu Zhang, “Freight transport model with autonomous inland shipping application and environmental externalities”
Opinion: The integration of environmental and economic factors in freight modeling is a holistic approach that could influence future policies and practices in the shipping industry.
ESR 13: Dhaneswara Al Amien, “Modelling the economic implications of the adoption of autonomous inland shipping”
Opinion: Understanding economic implications is critical for the broader adoption of autonomous shipping. This research is essential for forecasting and navigating the economic shifts that will accompany technological changes.
ESR 14: Sophie Orzechowski, “Toolbox for autonomous inland shipping regulation”

Opinion: Regulation is often a bottleneck in the deployment of new technologies. Developing a toolbox for regulation is strategic and necessary for facilitating smoother transitions to new shipping technologies.
ESR 15: Camilla Domenighini, “Towards a seamless integration of autonomous inland shipping in risk distribution models”

Opinion: Addressing risk in autonomous systems is complex but crucial. This research could lead to better risk management frameworks, ensuring that autonomous shipping evolves in a way that manages potential liabilities effectively.
An article by Lingyu Zhang.