The Physical Safety Challenges in the Mass Deployment of Autonomous Vessels

Autonomous vessels have been silently gaining traction in the maritime industry due to their potential to improve safety, efficiency and reduce the overall operating costs. In fact, while solving the full self-driving (FSD) problem for cars still seems to be a distant dream, progress in the waters looks very promising [1]. While there are already a few autonomous vessels operating or being tested around the world, the mass deployment of this technology comes with its own set of safety challenges that need to be addressed. In this blog post, we will discuss the key physical safety challenges that will play a crucial role in the mass deployment of autonomous vessels.

Figure: Roboats are self-driving boats developed by MIT and the Amsterdam Institute of Metropolitan Solutions [2].

Figure: The Norwegian vessel “Yara Birkeland” is capable of navigating autonomously [3].
Sensors: A mixed blessing for autonomy
A key difference between conventional and autonomous vessels is the additional sensors onboard the latter, which assist either the remote operator or the onboard supervisor/computer in decision-making. The sensors must provide accurate information about the vessel’s state (position, orientation, velocity, etc.), the external environment (wind, waves, and current), and obstacles (other vessels, bridges, etc.). In addition to conventional sensors such as Global Positioning System (GPS), gyroscope, compass, and inertial measurement unit (IMU), modern ships are also equipped with LIDARs, cameras, radar, sonar, and communication devices to facilitate the exchange of information with other vessels in a fleet. However, these additional components also pose new challenges to the safety of the vessel, since a fault in one of these components during an ongoing journey may degrade the performance or make the vessel unstable, thereby causing unwanted delays, disruptions, damage to infrastructure, or even loss of life. The harsh marine environment may additionally contribute to the degradation of these sensors, due to the presence of salt spray and moisture.
While sensor measurements may occasionally get corrupted by external disturbances, their impact on the vessel can be easily compensated by a robust control system. However, a fault having a more significant impact cannot be neglected. For that reason, it is critical that a sensor fault is diagnosed as soon as possible and that action is taken to accommodate it. The diagnosis of a sensor fault can be performed by following a 3-step process. Firstly, the monitoring algorithm must detect that one or more sensor measurements are drifting from a healthy behaviour due to some anomaly. Further, the algorithm must be able to isolate the exact sensor(s) with a fault. And finally, to ensure an undisrupted operation of the vessel, the faults must be reconstructed so that they can be accommodated by different means, such as by switching to manual control, controller redesign, or system reconfiguration.
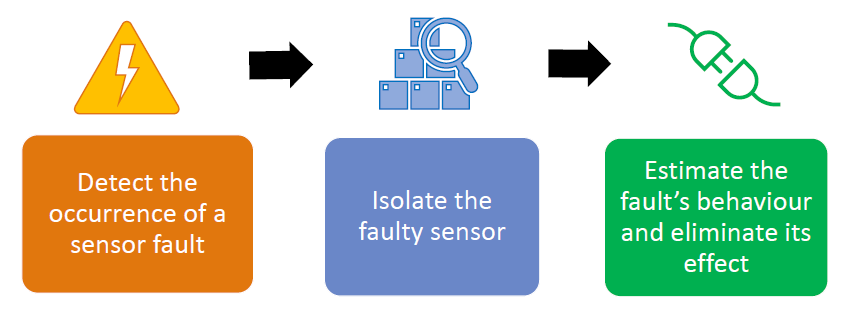
Figure: The key steps required to be performed for diagnosing sensor faults in vessels.
Diagnosis of cooperative vessel systems: Strengthening the future inland vessels
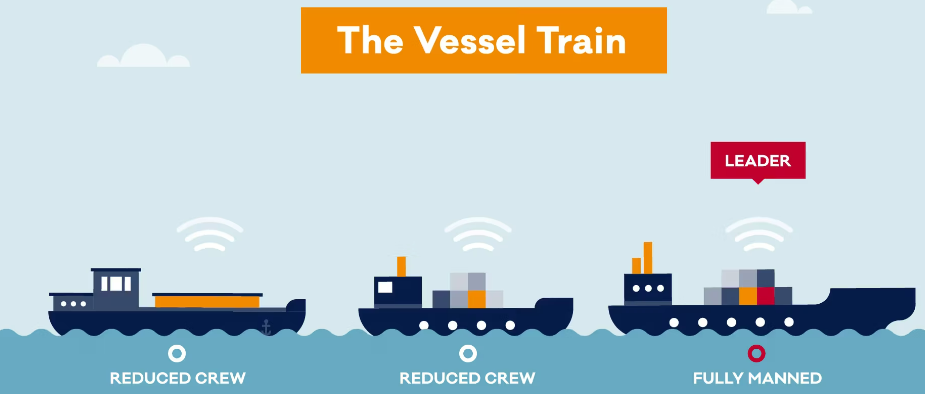
Figure: The vessel train concept as envisioned in the Novimar project [4].
There is a need to alleviate traffic congestion on roads, and as a result, inland waterways such as canals and rivers will arguably be at the forefront of the mass deployment of autonomous vessels. However, many navigational challenges must be addressed to make mass autonomous inland shipping a reality. These challenges include handling the complex interactions of vessels with bridges and locks, complying with the strict navigational constraints due to narrow canals and passing vessels, as well as constraints on water depth and congestion at port terminals. To effectively tackle some of these challenges, autonomous vessels must cooperate with each other, performing the required tasks in a fleet.
Multi-vessel cooperation facilitates carrying out a wide variety of operations that a single vessel is incapable of or inefficient in performing, such as bulk cargo transportation, manipulation of large structures and assisted berthing of ships. Establishing communication with other vessels will also reduce the possibility of accidents, thereby enhancing the safety of inland transportation. Similarly, for seamless movement through bridges and locks, the vessels must also be capable of communicating with these components.
It is even more crucial for operations involving the cooperation of multiple vessels to ensure the timely diagnosis of faults, as the faults may propagate to other vessels/infrastructure through the communication links, for example, due to the exchange of sensor information. Consequently, a fault-tolerant surface vessel will have a higher operational capability, making it more reliable for operations in complex environments, often referred to as “dirty, dull, and dangerous” operations.
Autonomous vessels have the potential to revolutionize the way we transport goods and people in inland waterways and open seas. As an early-stage researcher within the AUTOBarge project, I aim to address some of the technical challenges in these systems by developing algorithms for their fault diagnosis, condition monitoring, and fault-tolerant control.
At the same time, it is important to implement robust cybersecurity measures, establish clear regulations and guidelines, provide adequate training and support, and invest in ongoing research and development [5].
An article by Abhishek Dhyani
References
[1] We’re still waiting for self-driving cars, but autonomous boats are already here https://edition.cnn.com/travel/article/autonomous-boats-spc-intl/index.html
[2] Roboat ready for self-driving pilots on the Amsterdam Canals. https://www.ams-institute.org/news/roboat-ready-self-driving-pilots-amsterdam-canals/
[3] Yara Birkeland press kit https://www.yara.com/news-and-media/media-library/press-kits/yara-birkeland-press-kit/
[4] The NOVIMAR Vesseltrain project. https://novimar.eu/
[5] Autonomous ships are on the horizon: here’s what we need to know https://www.nature.com/articles/d41586-023-00557-5