Legal Research on IWT Innovation
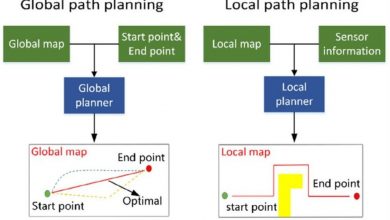
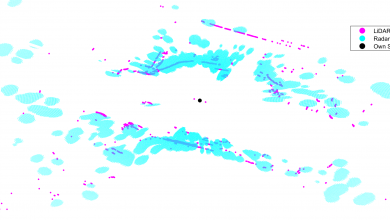
On the 8th and the 9th of November 2023, a substantial number of AUTOBarge ESRs presented their research on autonomous inland shipping in two special sessions at ICMASS 2023. During ICMASS many technological solutions for autonomous shipping were discussed (See for instance, on collision avoidance, the different options described in the work of a fellow AUTOBarge ESR, Hoang Anh Tran (Tran et al. 2023) [1]. The question that arises is then: how can legal research play a role when the technological options are still on the table?

Figure 1. AUTOBarge at ICMASS. From left: Prof. Edmund Brekke, Martin Baerveldt, Hoang Anh Tran and Camilla Domenighini (in the back), Abhishek Dhyani and Rana Saha (in the front), Yan-Yun Zhang, Prof. Rudy Negenborn, Sophie Orzechowski and Dhaneswara Al Amien.
The introduction of autonomous technologies will lead to a drastic change in business models and in the current actors in the IWT ecosystem (e.g. onboard crew and master) and the entrance into the contractual chain of new actors (e.g. autonomous technology provider). Therefore, the legal researcher can analyse how the implementation of these technologies may disrupt the risk distribution balances achieved by the IWT sector.
Without a clear risk distribution framework in fact, market actors may be reluctant to invest in it, hampering the commercial implementation of autonomous barges. At the same time, especially in the case of IWT, where the people live in riparian areas where autonomous vessels would navigate, the absence of a certain legal framework that allocates liabilities and costs in case of damage may scare prudent legislators and civil society.
The goal of research on risk distribution for autonomous IWT is, on one side, to grow awareness in the sector to allow stakeholders to develop a risk management strategy in advance and to support policy makers in their legislative task.
Many bottlenecks – not only from a legal perspective but also from an economic one: one could think about solving split benefits through charter parties- standing in the way of autonomous IWT could be solved contractually. However, in the context of mandatory transport laws (e.g., under the CMNI, any contractual arrangements that change the risk distribution provided by the convention by excluding, limiting or increasing the liability of the carrier or shifting the burden of proof is void), and considering the role of extracontractual liability in case of accidents (e.g., the definition of fault of the vessel under the Geneva Collision Convention), the reference to regulatory aspects (e.g., manning requirement as prescribed by regulations for seaworthiness, art. 3.3 CMNI) and the uncertainty related to the availability of risk management mechanisms for new ecosystem actor (e.g. liability limitation under the CLNI 2012 for the provider of the technology), it is clear that law amendments and/or the adoption of adaptive interpretations cannot be disregarded either, to propose a balance and efficient risk distribution framework.
The first step is to analyse gaps and obstacles in the current legislation, which was not drafted with autonomous systems in mind. This analysis must also be supported by an investigation of the caselaw, as judges are the main interpreters of the law and play an essential role in the allocation of liability and costs.

Figure 2. A maritime lawyer interrogating an “AI Barge Captain”. Generated with AI by Designer.
However, legal research that aims at having a social impact cannot only come up with the best and most efficient system. To achieve real acceptance and implementation, the research must strive to respond to the need of the sector. Legal experts can implement those preferences through participatory legal research, where stakeholders are key players who contribute to defining the legal design both at contractual and regulatory levels.

Figure 3. Vision on participatory legal research on autonomous IWT. Generated with AI by Designer.
Finally, coming back to the initial question, legal research can also offer substantial help in selecting the best technology to implement. At an equal level of performance, a risk distribution analysis of the various collision avoidance systems may clarify which system would allow the best balance in risk distribution, for example, leveraging those actors who can more easily enforce safety, which is more desirable for the efficient functioning of the entire ecosystem.
In conclusion, the work of a law researcher investigating innovation in transportation is a mix of rigorous traditional legal research, creativity, and innovative methodologies, striving for an interdisciplinary perspective. This, indeed, is what we aim to achieve in AUTOBarge.
An article by Camilla Domenighini.
Bibliography
[1] Tran, H. A., Johansen, T. A., & Negenborn, R. R. (2023). Collision avoidance of autonomous ships in inland waterways – A survey and open research problems. Journal of Physics: Conference Series, 2618(1), 012004. https://doi.org/10.1088/1742-6596/2618/1/012004