


On March 26, 2024, at around 1:30 AM, on a clear night, a massive cargo ship lost its steering power as it left the busy port of Baltimore, United States. In an unfortunate series of events, the vessel, carrying a hundred thousand tonnes of goods, drifted off course and collided with the historic Francis Scott Key Bridge, leading to casualties of unaware construction workers on the bridge. At the same time, the significant disruption of maritime traffic reminded everyone of a similar event in 2021, this time involving the container ship “Ever Given” in the Suez Canal. These incidents highlight a critical issue in modern shipping: the need for increased safety and reliability.


Early investigations suggest that the collision of the container ship ‘Dali’ into the Francis Scott Key Bridge in Baltimore (2024) was a result of the ship’s loss of power [Picture credits: CNN].
Enter Autonomous Vessels
As the maritime industry advances, Autonomous Surface Vessels (ASVs) are emerging as a promising solution to enhance safety and operational efficiency. By reducing human error and improving decision-making capabilities, ASVs have the potential to revolutionize shipping. But this leads to an important question: Will ASVs truly make maritime operations safer? While autonomous navigation systems onboard ASVs can significantly reduce navigational casualties, they are not immune to failures or unexpected situations. This is where risk-aware control becomes crucial. Let us understand this through a practical example.
Imagine an IMO Level-3 autonomous vessel being remotely operated from a shore control center along a busy inland waterway like the Rhine River. Suddenly, the control center loses connectivity with the vessel due to a communication failure. Without the ability to precisely localize and guide the vessel, a basic fallback strategy might be to simply maintain the vessel’s current position. However, this simple approach could be risky, as it does not account for dynamic external factors such as nearby vessels, traffic density, proximity to locks, or adverse weather conditions. These variables can quickly turn a seemingly safe decision into a dangerous one, especially in congested waterways where precise navigation and timely responses are critical.
In this critical situation, risk-aware control offers a more sophisticated solution. Instead of relying on a static response like holding position, the autonomous system onboard can assess the real-time risk factors to decide the safest course of action. For instance, the system might use AIS and onboard sensors such as radar and LiDAR to monitor traffic, detect approaching obstacles, and evaluate environmental conditions. Based on this data, the vessel can make informed decisions, such as:
- Hold Position: If the area is free from immediate hazards, staying in place might be the safe option.
- Navigate to Safety: If the vessel is near a traffic choke point or approaching a lock, it may be safer to continue sailing to a predetermined safe harbor or less congested area.
- Communicate Status: Broadcasting its situation to nearby vessels to prevent collisions.


Even the seemingly calm inland waterways can suffer from choke points, as seen in this picture from Yangtze River, China [Picture Credits: Xinhua, SCMP]
What exactly is Risk-aware control?
Risk-aware control refers to a control strategy that explicitly accounts for uncertainty, potential hazards, and risks in the operation of a system. Unlike traditional control systems that optimize performance under nominal conditions, risk-aware control prepares for adverse events and worst-case scenarios. This is crucial for autonomous ships that must operate safely and efficiently with minimal human intervention.
In the earlier example, the vessel’s decision-making relies heavily on the principles of risk-aware control. By using these principles, the vessel can compare different strategies and choose the one that minimizes potential hazards. The use of fault-tolerant control and additional onboard sensors enables the vessel to continue operating autonomously, even in the absence of communication from the shore.
Risk as a Factor in Autonomous Navigation System Design
Risk assessment is a key aspect of risk-aware control, which helps to quantify potential risks. This involves calculating the probability of various failure scenarios or hazardous situations, such as collisions, grounding, or severe weather conditions using onboard sensors and equipment, and evaluating their potential impact on the vessel. Mathematically, it can be expressed as:
Risk = Probability of failure x Consequence
where, the consequence is often defined in terms of monetary loss associated with the failure. By embedding risk-aware principles from the outset, developers can ensure that vessels are equipped to handle uncertainties and dynamic environments. Some recent research has already achieved interesting results in this direction (see the references at the end).
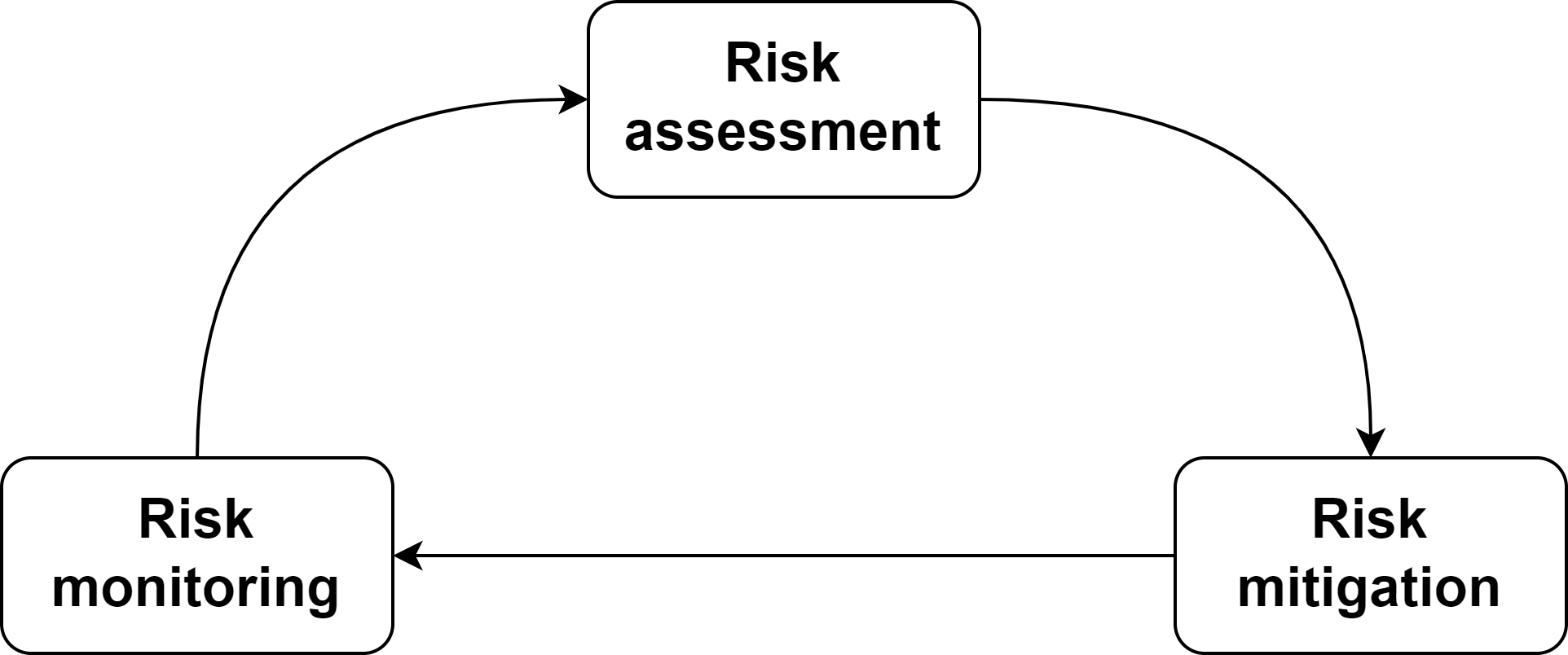

The risk management pipeline.
As the maritime industry moves toward greater autonomy, integrating risk-aware control into navigation systems will be a cornerstone in building trust and ensuring the successful adoption of ASVs in global shipping operations.
An article by Abhishek Dhyani.
Further Reading
[1] Thieme, C.A., Rokseth, B., and Utne, I.B. (2023). Risk-informed control systems for improved operational performance and decision-making. Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability, 237(2), 332–354. doi:10.1177/1748006X211043657.
[2] Blindheim, S., Johansen, T.A., and Utne, I.B. (2023). Risk-based supervisory control for autonomous ship navigation. Journal of Marine Science and Technology, 1–25.
[3] Wang, Z., Wu, Y., Chu, X., Liu, C., & Zheng, M. (2023). Risk Identification Method for Ship Navigation in the Complex Waterways via Consideration of Ship Domain. Journal of Marine Science and Engineering, 11(12), 2265.
[4] Dhyani, A., Wang, Y., Verbeke, M., Pissoort, D. and Reppa, V. (2024). A POMDP Model-Based Online Risk Mitigation Method for Autonomous Inland Vessels. 15th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles 2024. https://www.seamless-project.eu/wp-content/uploads/2024/09/A-POMDP-model-based-online-risk-mitigation-method-for-autonomous-inland-vessels.pdf