

Introducing AUTOBargeSim – a MATLAB toolbox to support mapping, modeling, control design, and the development of collision-avoidance algorithms for autonomous inland navigation.
AUTOBargeSim aims to enhance reproducibility in the design and evaluation of autonomous navigation systems – and it’s constantly being improved!
Key features:
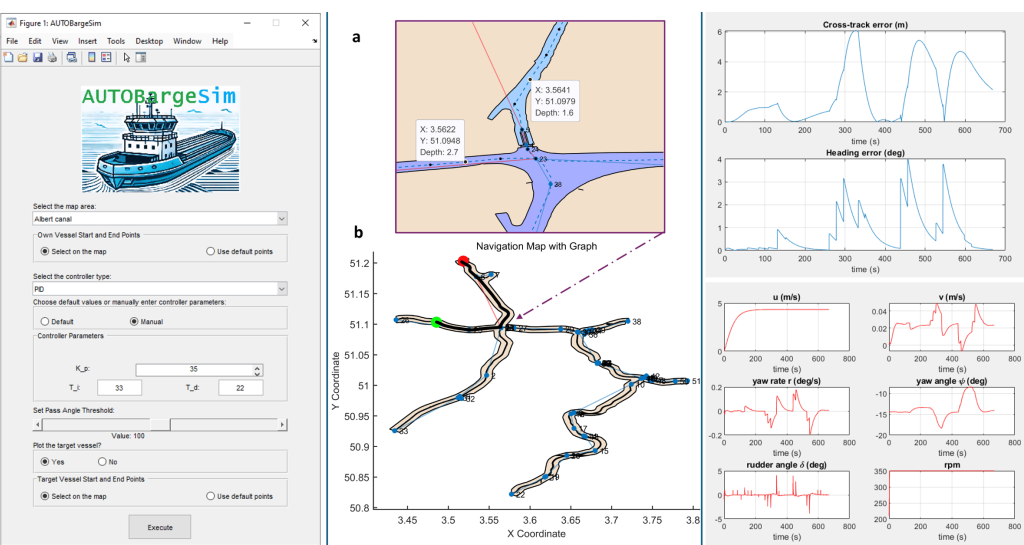
- Performance evaluation using KPIs
- Modular architecture
- Extensive documentation
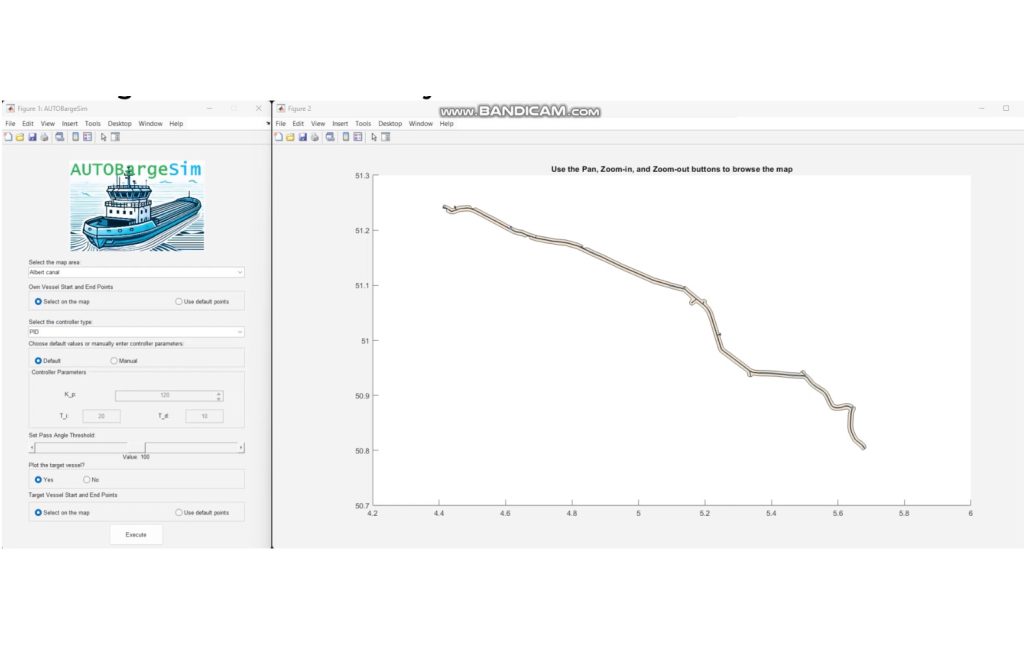
- Intuitive graphical user interface (GUI)
This work is the result of a joint effort of the following AUTOBarge ESRs: Zhongbi Luo, Yan-Yun Zhang, Hoang Anh Tran, Chengqian Zhang, Dhanika Mahipala, AmirReza Haqshenas M., Abhishek Dhyani, and Abhishek’s supervisor Vasso Reppa, and many insightful discussions within the MSCA ETN AUTOBarge consortium.

Catch the presentation at the 16th International Federation of Automatic Control Conference on Control Applications in Marine Systems, Robotics and Vehicles (CAMS), taking place in Wuhan, China, from August 25–28, 2025
Preprint (Arxiv): https://arxiv.org/abs/2503.21594