


As discussed in a previous blog post (http://tinyurl.com/3sen5ns4), a communication protocol for collision avoidance is necessary for future scenarios of inland waterway traffic. In this blog, we shall discuss further about this communication protocol and the challenges when developing it.
Compared to other transport models, such as cars or airplanes, a ship’s dynamics are usually slower and takes longer to change course. This gives ships more time to decide when encountering an obstacle, but one wrong decision could lead to a serious accident. Therefore, in manned cases, captains usually communicate through radio to exchange intentions and collaboratively avoid collisions. Similarly, collaboration is necessary for the collision avoidance of autonomous ships. Unlike manned ships, unmanned ships need a clear protocol to communicate and effectively exchange/negotiate intentions.
One of the early approaches is using a communication center as a coordinator to control the collaboration between ships (see Fig. 1). The coordinator is responsible for calculating a solution for all ships within the network. This approach is usually referred to as the centralized communication framework. The main advantage of the centralized approach is the global optimality of the collision avoidance solution. The centralized architecture reduces the computation burden for ships since the coordinator does all the computing. However, when a ship loses its connection to the coordinator, it becomes isolated, and accidents can happen.
Another approach is the distributed communication framework (see Fig. 1). In a distributed framework, ships communicate directly with each other without the presence of a coordinator, and each ship calculates its solution with concerns for mutual benefits. The drawback of this framework is that the solution is usually not globally optimal due to the lack of a coordinator. However, because each ship makes its own decision, a collision could be avoided even in the case of lost connections. Therefore, a distributed framework becomes a more promising approach.
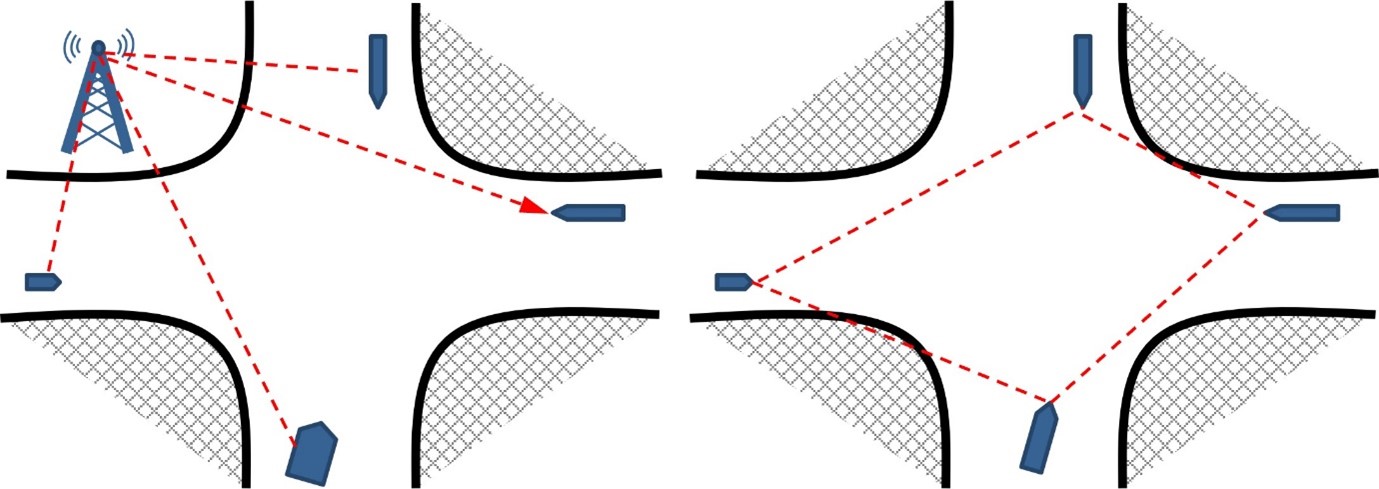

Figure 1. Two approaches for communication framework: Centralized approach (left), and distributed approach (right).
Regarding the distributed communication framework, two main communication schemes for collaborative collision avoidance of autonomous ships are parallel and serial. The main difference between these two schemes is the timing of when ships make decisions. In a parallel scheme, all ships are expected to make decisions simultaneously. In a serial scheme, ships take turns making decisions following a predefined order. Each scheme has its advantages and disadvantages. On the one hand, the parallel scheme could reduce negotiation time, but a conflict of objectives could potentially arise between ships [1]. On the other hand, the serial scheme can avoid potential conflicts in exchange for a higher negotiation time.
Although a great deal of effort is spent on developing a communication framework for collaboration collision avoidance among autonomous inland ships, there are open problems that hold back the implementation of these communication frameworks in traffic. Firstly, a communication protocol should concern traffic regulations. This means that a collaborative collision avoidance solution for ships should comply with traffic rules. In the case of inland waterway traffic, this problem is even more complex since the traffic rules vary depending on the region that a ship sails in [2]. Secondly, a practical communication network is imperfect, i.e., affected by packet loss, delays, or noises. This problem is referred to in the literature as asynchronous networks. Although studies have proposed solutions to address the issue of asynchronous communication protocol [3], a complete solution has not yet been proposed.
All in all, a communication protocol for collision avoidance is necessary for the implementation of autonomous ships in inland waterway traffic. However, some problems must be solved before a communication protocol can be used in real-world applications.
An article by Hoang Anh Tran.
References:
[1] L. Chen, H. Hopman, and R. R. Negenborn, “Distributed model predictive control for vessel train formations of cooperative multi-vessel systems,” Transportation Research Part C: Emerging Technologies, vol. 92, pp. 101–118, Jul. 2018, doi: 10.1016/j.trc.2018.04.013.
[2] H. A. Tran, T. A. Johansen, and R. R. Negenborn, “Collision avoidance of autonomous ships in inland waterways – A survey and open research problems,” J. Phys.: Conf. Ser., vol. 2618, no. 1, p. 012004, Oct. 2023, doi: 10.1088/1742-6596/2618/1/012004.
[3] L. Ferranti, L. Lyons, R. R. Negenborn, T. Keviczky, and J. Alonso-Mora, “Distributed Nonlinear Trajectory Optimization for Multi-Robot Motion Planning,” IEEE Trans. Contr. Syst. Technol., vol. 31, no. 2, pp. 809–824, Mar. 2023, doi: 10.1109/TCST.2022.3211130.